Work
Click to expand each section.
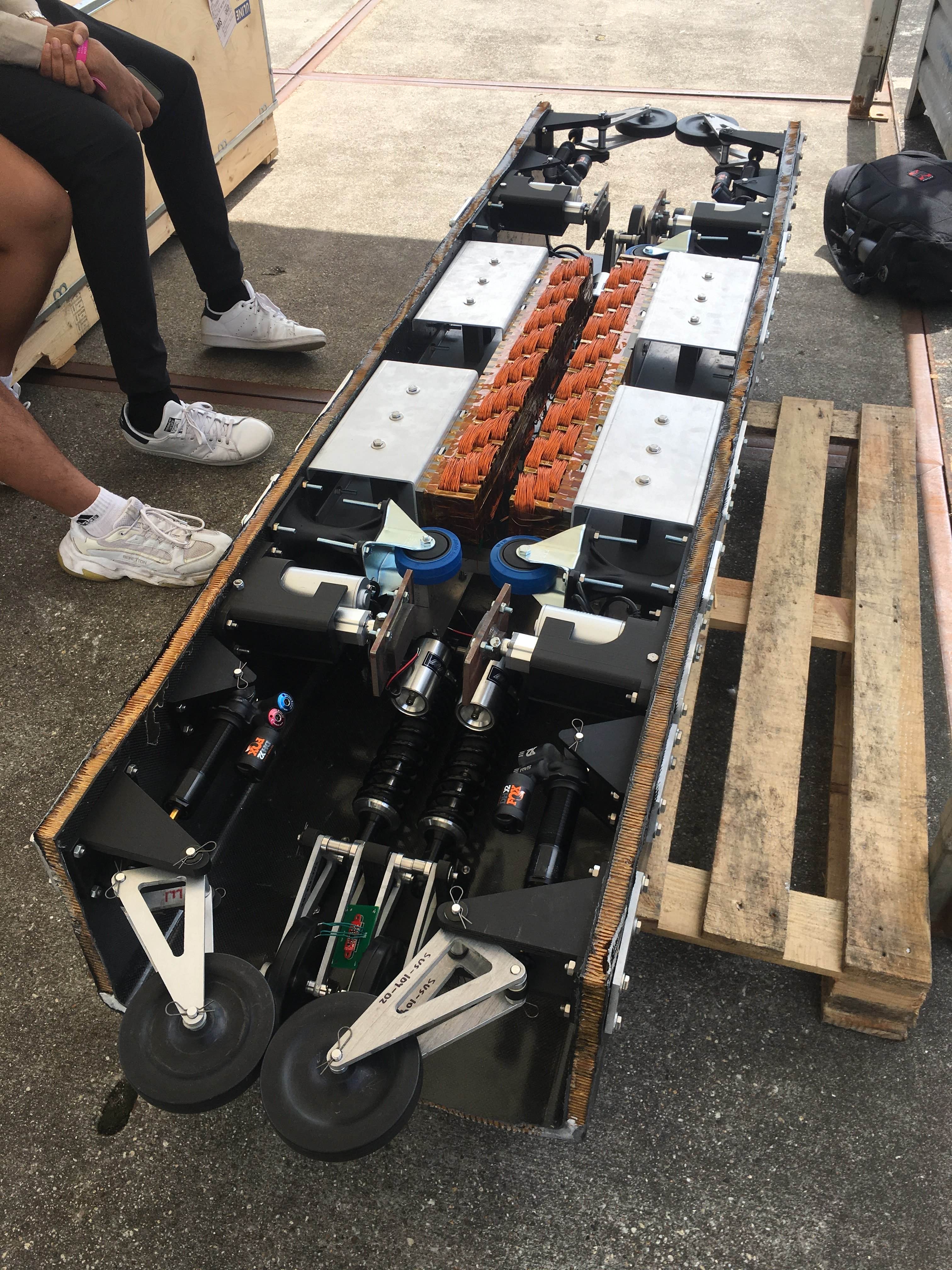
Full-scale hyperloop pod with hybrid electromagnets (levitation) and linear induction motors (propulsion). Led electrical systems for 25-person team.
- Team leadership: Scaled organization from 5 → 120 people across 2.5 years
- Systems architecture: Approved designs across Power Electronics, Embedded Systems, and Communications teams
- Manufacturing optimization: Reduced procurement, manufacturing, and assembly timelines through design-for-manufacturability focus
- Competition result: Best North American Pod at European Hyperloop Week 2022 (TU Delft, Netherlands)


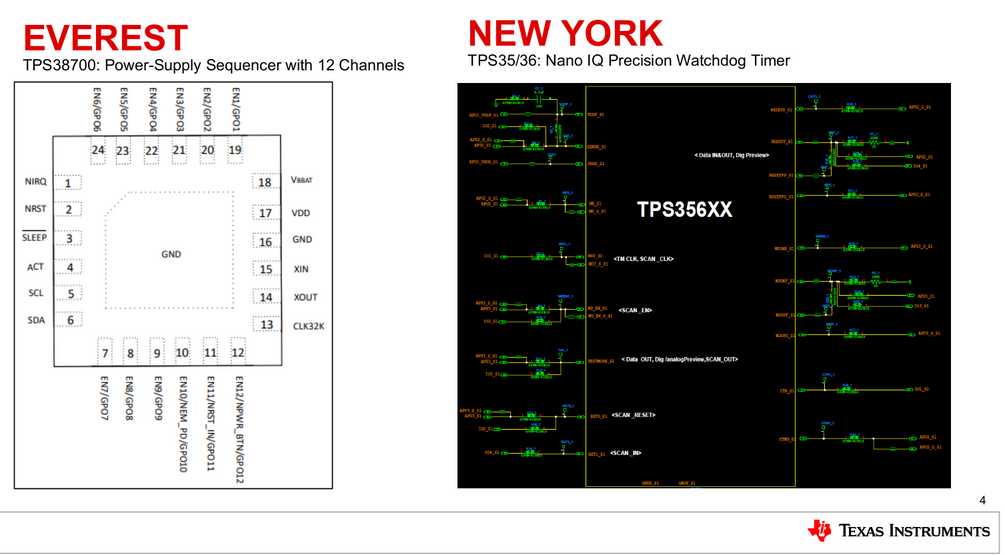
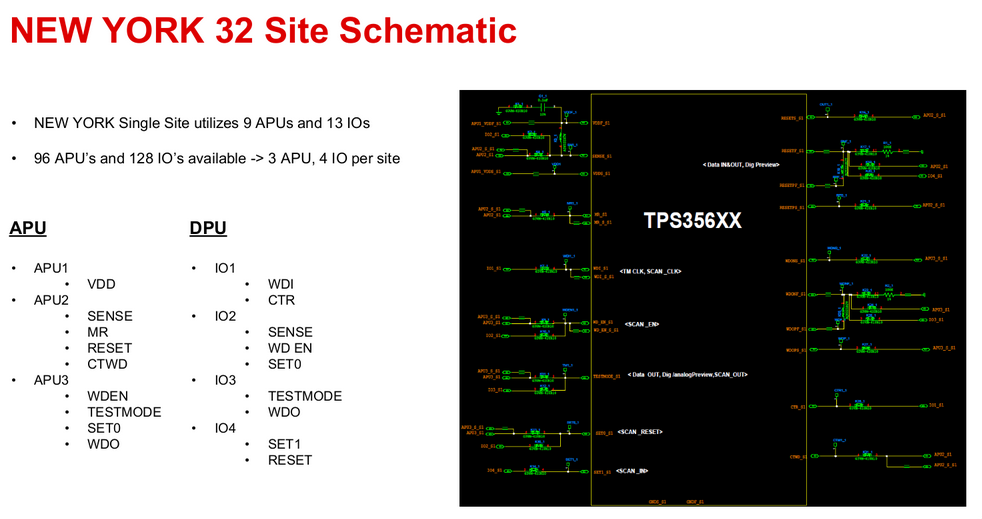
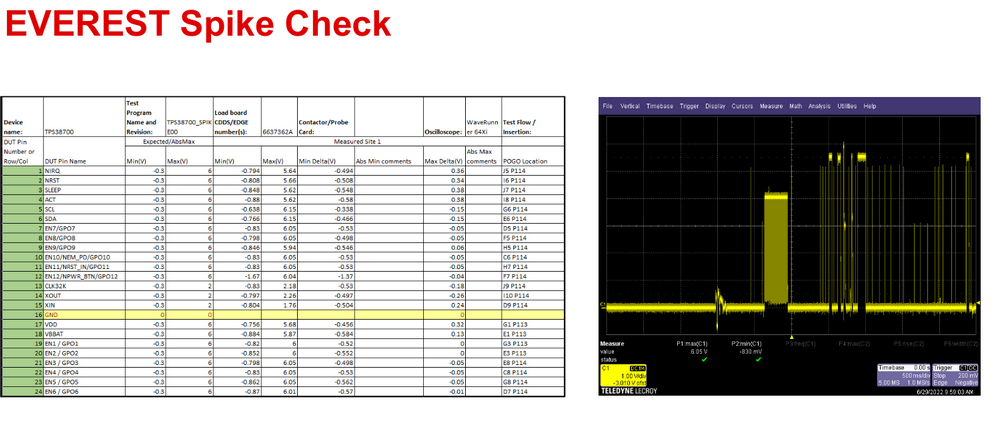
Test engineering for automotive power management ICs. Summer internship developing production test methodologies.
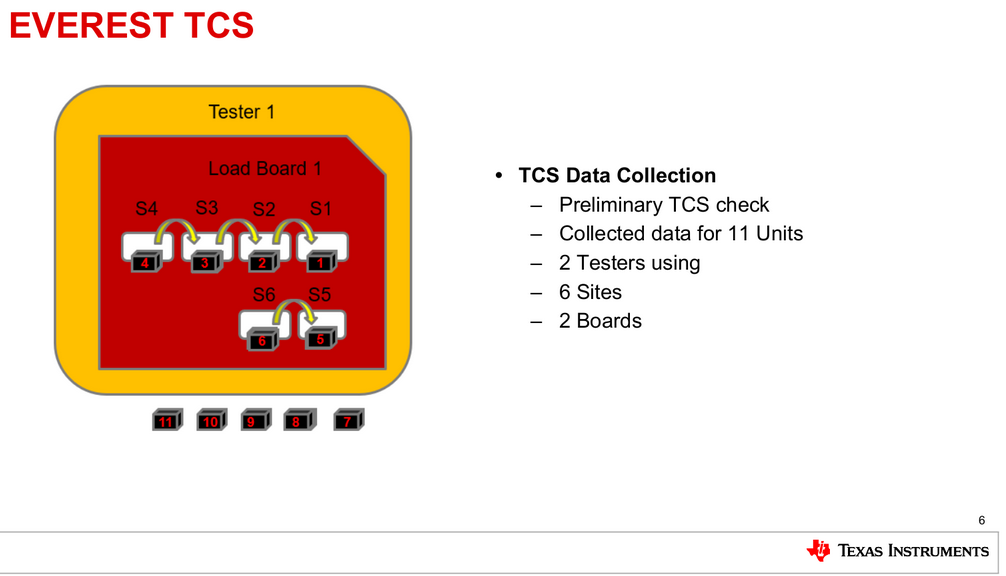
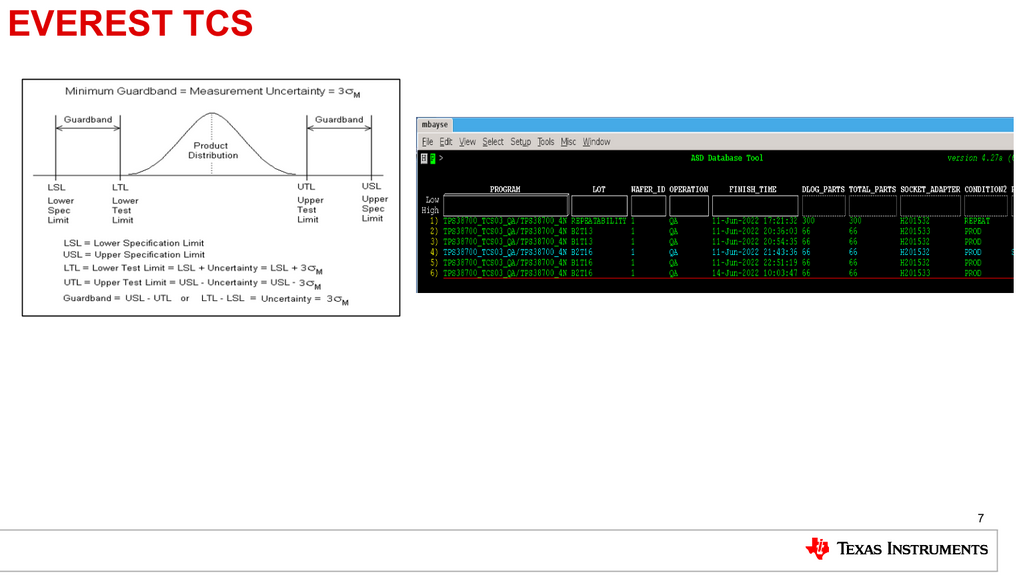
- Test development: C++ on Eagle Test System for automotive power-supply sequencer, implementing alternating odd/even parallel testing for reliability
- Production specifications: Established test thresholds and specs for market launch via Spotfire data analysis
- Products: TPS38700 sequencer, TPS35/36 watchdog timers

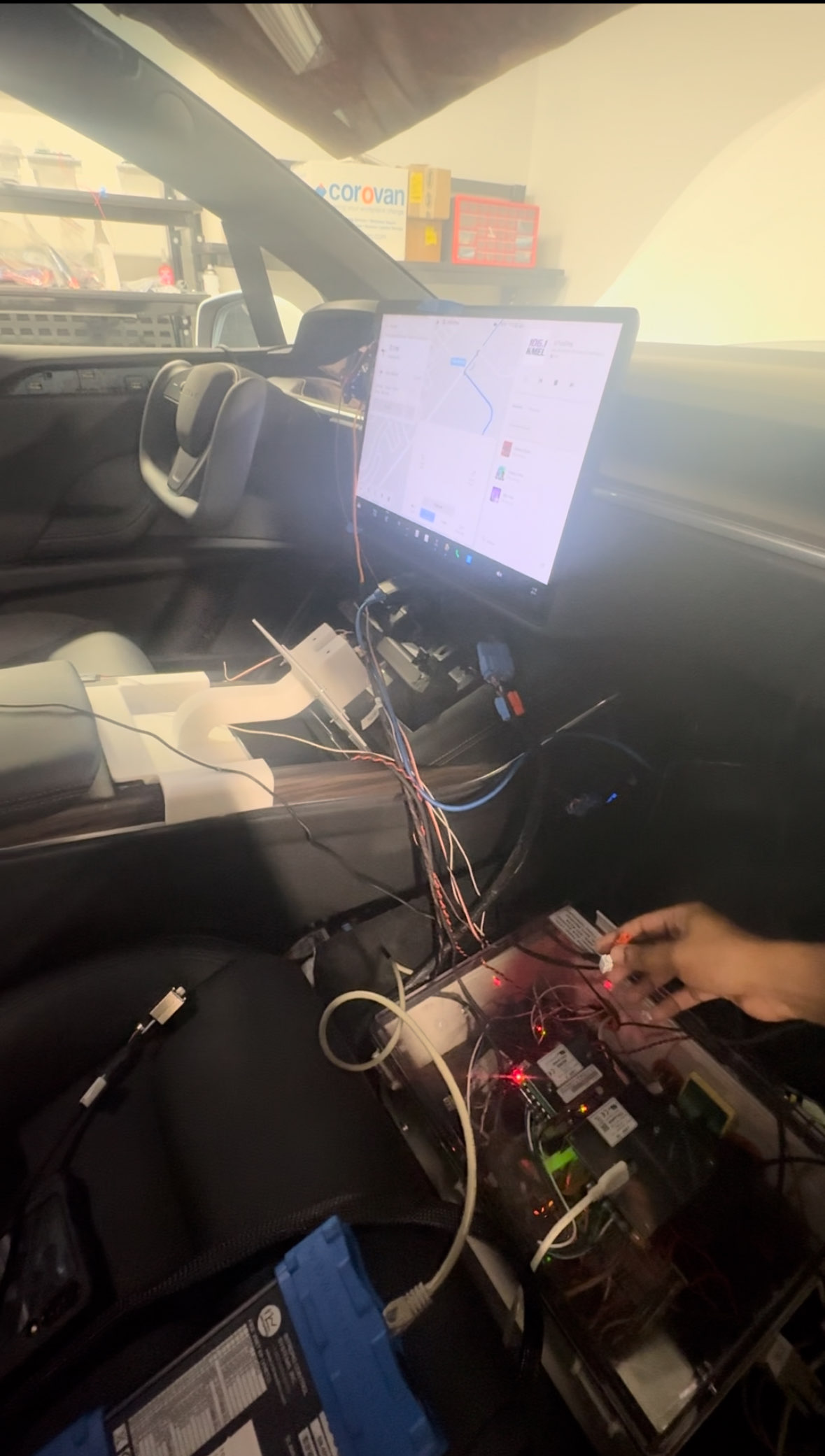
Software engineering for Cybertruck camera and audio systems. 6-month co-op during semester off.
- Backup camera testing: Computer vision-based Python framework adapting to lighting conditions, CAN signal monitoring, 100% accuracy across all Tesla models
- Servo firmware: C firmware + Python abstraction layer for automated test setup with precise control and minimal latency
- Test fleet ownership: Full responsibility for backup camera and audio performance, debugging with firmware engineers via CAN signal analysis
- CI/CD infrastructure: Linux NUC setup integrated with Jenkins for development pipeline
Vision systems engineering for lunar lander navigation. 8 months on spacecraft software integration and testing.
- Camera-in-loop simulation: VR MicroLED pancake lens streaming simulated moon surface to flight camera for navigation testing with pixel-level precision
- Automated lens focusing: Python script with QR code + Siemens star + Canny Edge detection for 15-second assembly window
- Flight software development: C++ camera-to-flight-computer connection over TCP/IP, RTSP, RTP protocols
- Test automation: Python scripts for TDMS file analysis, visualization, and PDF report generation
Started during undergrad with people from Texas Guadaloop. Went full-time after graduating May 2025. Press: Daily Texan, UT News.
Pivot 0: FluxAlpha (Levitating camera vehicle)
Oct 2022 Dec 2024
Problem: Camera vehicles for motorsports broadcasting max out at 80 km/h. F1/NASCAR cars run 230+ mph - existing systems can't keep up with the action.
Constraints: Full-time students splitting time between school and project. Capital intensive - needed multiple six figures to complete LIM development and testing, unable to secure funding.
Built: Frictionless camera rig using hybrid electromagnets for levitation + linear induction motors for propulsion. Autonomous camera mount with remote control to select specific cars.
Impact: Completed levitation system + embedded electronics (prototype). Connected with Head of Broadcast at Fox Sports, invited to IndyCar, brought prototype to Circuit of the Americas. Stopped at LIM phase due to capital constraints.
Pivot 1: Dynamics PitCam (Autonomous PTZ camera)
Jan 2025 Jun 2025
Problem: Need autonomous camera tracking for motorsports. Manual camera operators are expensive (insurance, travel, multi-day) and limited in positioning.
Constraints: Minimal training data for ML model. No access to manufacturing for custom hardware. Had to integrate off-the-shelf components that weren't designed for this use case.
Built: Three parallel projects: (1) Few-shot learning ML model for vehicle tracking with limited data, (2) Custom weatherproof PTZ camera hardware (no off-the-shelf cameras are both broadcast-quality and weatherproof) - CAD design + camera module + NVIDIA Jetson Nano integration, (3) Racing game simulation for testing tracking algorithms under varied conditions.
Impact: Working autonomous tracking system demonstrated at F1 speeds.
Pivot 2: OmniTrack (Wireless camera network for motorsports)
Jun 2025 Sep 2025Problem: Need track coverage solution faster than custom PTZ development.
Constraints: Speed - needed rapid deployment. Used phones (computer + camera + streaming + remote control in one package). Track location was far with minimal site accessibility - cars always on track, limited installation windows.
Built: Static multi-camera system using phones for rapid prototyping. Wireless video streaming with remote control capability.
Impact: Deployed at Harris Hills Raceway, ran full race series. Realized approach wasn't scalable - pivoted to Augmenti in October 2025.
Pivot 3: Augmenti
Oct 2025 NOWProblem: Live experiences like go-karting lack real-time contextual feedback during the session. Existing solutions only log data for post-session review.
Constraints: 3 weeks of runway - had to go from ideation → prototype → working solution → deployed with paying customer in 3 weeks.
Built: Real-time AI audio coaching system for outdoor, high-vibration karting environment. Hardware: Raspberry Pi 4B + BNO085 9-DOF IMU + MAX-M10S GPS + Polar heart rate sensor + ESP32-S3 Bluetooth beacon + USB speaker in weatherproof enclosure. Software: Context encoding layer processes live telemetry, generates adaptive audio. Pit lane control station uses BLE 5.0 Coded PHY for long-range monitoring/control. System designed for 4-5 hour runtime.
Impact: 5 units produced and deployed at SpeedSportz Racing Park. 100+ sessions logged, 83 paid uses. Received order for 20-unit expansion. Company closed due to runway constraints before fulfilling expansion order.

Built: frictionless levitating camera rig + LIM propulsion path.
Big vision. Hard physics. The bottleneck wasn't ambition it was runway.
Test windows matter more than opinions.
Built: few-shot tracking + custom weatherproof PTZ hardware + simulation loop.
Constraints don't block you they shape architecture.
Make the system want to work.
Built: rapid multi-camera coverage prototype using phones + remote control.
Rapid deployment buys learning. Scaling needs a unit that replicates cleanly.
If it's hard to reinstall, it's hard to sell.
Built: real-time AI coaching system + robust outdoor deployment stack.

Start with what the system needs, not what you want. Integrate first. Earn agency.
When in doubt, be clear.